If you’re doing something relatively simple, Dask has integrations with Scikit-Learn and XGBoost. You can also pass PyTorch models into Scikit-Learn with Skorch and TensorFlow models with SciKeras.
But if you need to do something more complex, Dask clusters can have python functions submitted to them to remotely execute code. This gives us the low level control to implement whatever bespoke algorithm we want and have it accelerated by remote GPUs.
In this example we’re going to write our own PyTorch functions to train a custom model on the CIFAR dataset. While we could do this with Skorch, we hope that this example gives you some idea of how Dask can be flexible enough for any applications that you need.
import torchimport torchvisionimport torchvision.transforms as transformsimport torch.multiprocessing as mp# Define data transformationstransform = transforms.Compose([ transforms.ToTensor(), transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)) ])# Define dataset and dataloaderbatch_size =1024trainset = torchvision.datasets.CIFAR10(root='./data', train=True, download=True, transform=transform)validset = torchvision.datasets.CIFAR10(root='./data', train=False, download=True, transform=transform)# Note that we need to set the multiprocessing context so that PyTorch doesn't get# PyTorch likes to use 'forking' while Dask uses 'spawn'trainloader = torch.utils.data.DataLoader(trainset, batch_size=batch_size, shuffle=True, num_workers=16, multiprocessing_context=mp.get_context("fork"))validloader = torch.utils.data.DataLoader(validset, batch_size=batch_size, shuffle=True, num_workers=16, multiprocessing_context=mp.get_context("fork"))
Files already downloaded and verified
Files already downloaded and verified
/apps/mambaforge/envs/dsks_2023.10/lib/python3.10/site-packages/torch/utils/data/dataloader.py:561: UserWarning: This DataLoader will create 16 worker processes in total. Our suggested max number of worker in current system is 2, which is smaller than what this DataLoader is going to create. Please be aware that excessive worker creation might get DataLoader running slow or even freeze, lower the worker number to avoid potential slowness/freeze if necessary.
warnings.warn(_create_warning_msg(
Note that this cell may warn us that there is a mismatch between our requested resources and the number of worker processes. This is ok, as we have sized this DataLoader to match the Dask worker that we request later on.
import torch.nn as nnimport torch.nn.functional as F# Define loss functioncriterion = nn.CrossEntropyLoss()# Define a simple conv netclass Net(nn.Module):def__init__(self):super().__init__()# Convolutional layersself.conv1 = nn.Conv2d(3, 16, 3, stride=2, padding=1)self.conv2 = nn.Conv2d(16, 16, 3, stride=1, padding=1)self.conv3 = nn.Conv2d(16, 32, 3, stride=2, padding=1)self.conv4 = nn.Conv2d(32, 32, 3, stride=1, padding=1)self.conv5 = nn.Conv2d(32, 64, 3, stride=2, padding=1)self.conv6 = nn.Conv2d(64, 64, 3, stride=1, padding=1)# Fully connected layersself.fc1 = nn.Linear(4*4*64, 4*64)self.fc2 = nn.Linear(4*64, 64)self.fc3 = nn.Linear(64, 10)def forward(self, x):# Pass through convolution layers x = F.relu(self.conv1(x)) x = F.relu(self.conv2(x)) x = F.relu(self.conv3(x)) x = F.relu(self.conv4(x)) x = F.relu(self.conv5(x)) x = F.relu(self.conv6(x))# Flatten all dimensions except batch x = torch.flatten(x, 1) # Pass through fully connected layers x = F.relu(self.fc1(x)) x = F.relu(self.fc2(x)) x =self.fc3(x)return x
This train function will load any saved state for the provided model, then train for a number of epochs. When its done it will then save the state and return the average loss of the last epoch.
import torch.optim as optimfrom tqdm.notebook import tqdm# loader: train dataloader# arch: model archetechture for training# path: model path for load and save# load: whether to load model from path# save: whether to save model to path# test: only run one batch for testing# error: throw an assertion error# return: average loss of epoch or loss of one batch if testingdef train(loader, arch=Net, path="./model", epochs=1, load=False, save=True, test=False): model = arch() optimizer = optim.Adam(model.parameters(), lr=3e-4) device ="cuda"if torch.cuda.is_available() else"cpu"# Load state from disk so that we can split up the jobif load: state = torch.load(path, map_location="cpu") model.load_state_dict(state["model"]) model.to(device) optimizer.load_state_dict(state["optimizer"])else: model.to(device)# A typical PyTorch training loop model.train()for _ inrange(epochs): running_loss =0for i, (inputs, labels) inenumerate(loader):# put the inputs on the device inputs, labels = inputs.to(device), labels.to(device)# zero the parameter gradients optimizer.zero_grad()# forward + backward + optimize outputs = model(inputs) loss = criterion(outputs, labels) loss.backward() optimizer.step() running_loss += loss.detach().item()# Save model after each epochif save: torch.save({"model": model.state_dict(),"optimizer": optimizer.state_dict() }, path)return running_loss /len(loader) ifnot test else loss.detach().item()
This valid function will load the state of the model we’ve defined, then calculate the average loss and accuracy over the dataset.
# loader: train dataloader# arch: model archetechture for validating# path: model path for load and save# return: average loss and accuracy of epochdef valid(loader, arch=Net, path="./model"):# Initialise device model = arch() device ="cuda"if torch.cuda.is_available() else"cpu"# Load state from disk so that we can split up the job state = torch.load(path, map_location="cpu") model.load_state_dict(state["model"]) model.to(device) model.eval()# A typical PyTorch validation loop running_loss =0 correct =0 total =0with torch.no_grad():for i, (inputs, labels) inenumerate(loader):# put the inputs on the device inputs, labels = inputs.to(device), labels.to(device)# forward outputs = model(inputs)# loss loss = criterion(outputs, labels) running_loss += loss.detach().item()# accuracy _, predicted = torch.max(outputs.data, 1) total += labels.size(0) correct += (predicted == labels).sum().item()return running_loss /len(loader), correct / total
Testing with a LocalCluster
Dask prefers to control all processes so that it can manage them more gracefully if they fail, but we need to give PyTorch the control to use multiprocessing as needed. To do this set proccesses=False to allow for multiprocessing inside Dask jobs.
from distributed import Client, LocalClustercluster = LocalCluster(processes=False)client = Client(cluster)
We can submit our function to the cluster with the client.submit method. This will return a future which can be unpacked with its result using future.result().
/apps/mambaforge/envs/dsks_2023.10/lib/python3.10/site-packages/distributed/client.py:3161: UserWarning: Sending large graph of size 146.58 MiB.
This may cause some slowdown.
Consider scattering data ahead of time and using futures.
warnings.warn(
/apps/mambaforge/envs/dsks_2023.10/lib/python3.10/site-packages/torch/utils/data/dataloader.py:561: UserWarning: This DataLoader will create 16 worker processes in total. Our suggested max number of worker in current system is 2, which is smaller than what this DataLoader is going to create. Please be aware that excessive worker creation might get DataLoader running slow or even freeze, lower the worker number to avoid potential slowness/freeze if necessary.
warnings.warn(_create_warning_msg(
2.066688299179077
client.shutdown()
Training with a SLURMCluster
Dask usually uses a ‘nanny’ that monitors any worker processes and gracefully restarts them if they fail or are killed while performing computations. The nanny is not compatable with daemonic processes - that is dask workers cannot perform multiprocessing while it’s being used. We therefore need to set nanny=False to turn off the nanny to allow for multiprocessing inside Dask jobs for the cluster to work with PyTorch. (Just like when we processes=False for the LocalCluster.)
We can pass in extra SLURM requirements in job_extra_directives to request a GPU for our jobs. To read more about configuring the SLURMCluster to interact with the SLURM queue, go to Dask’s jobqueue documentation.
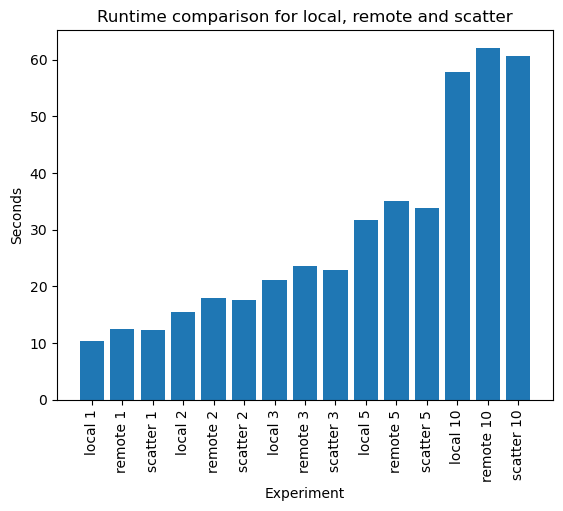
Offloading tasks to Dask doesn’t come for free, there is an initial cost associated with sending the data to a remote device. Let’s compare the time it would take to train a Resnet18 on CIFAR for a range of epochs comparing a local GPU, a remote GPU using Dask and a remote GPU using Dask with a scattered dataset. For this expriment we will not bother saving the weights afterwards since this should be relatively constant between methods.
Note that this test was run directly on the compute node to gain direct access to the GPUs to measure overheads. You will only be able to mimic our results for the final graph if you’re running with an inbuilt GPU (Tabby service) since it compares reserved GPUs with Dask driven GPU jobs. Running this cell in a lion service will likely freeze the notebook since you’d have no accelleration.
from torchvision.models import resnet18from time import time# Store times in arrayslocal = []remote = []scatter = []# Test some number of epochsepoch_list = [1, 2, 3, 5, 10]with tqdm(total=(len(epoch_list) *3)) as pbar:for num_epochs in epoch_list:# Local GPU start = time() train(trainloader, arch=resnet18, epochs=(num_epochs +1), save=False) local.append(time() - start) pbar.update()# Remote GPU start = time() client.submit(train, trainloader, arch=resnet18, epochs=(num_epochs +1), save=False).result() remote.append(time() - start) pbar.update()# Remote GPU with scatter start = time() trainloader_future = client.scatter(trainloader) client.submit(train, trainloader_future, arch=resnet18, epochs=(num_epochs +1), save=False).result() scatter.append(time() - start) pbar.update()
import matplotlib.pyplot as pltfrom itertools import chaindata =list(chain(*zip(local, remote, scatter)))columns = []for num_epochs in epoch_list:for test in ["local", "remote", "scatter"]: columns.append(test +" "+str(num_epochs))plt.bar(range(len(data)), data, tick_label=columns)plt.xticks(rotation=90)plt.xlabel("Experiment")plt.ylabel("Seconds")plt.title("Runtime comparison for local, remote and scatter")plt.show()
From this experiment we can see that the cost associated with running code remotely is small, and the impact decreases with the size of the function that we submit. It also shows that it always makes sense to scatter large objects before computing, even for small jobs.